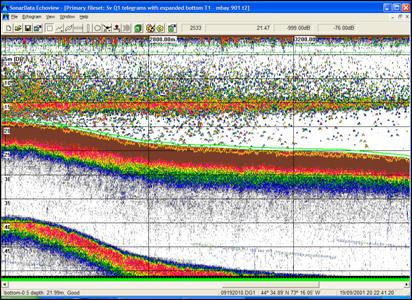
Figure 20. Echogram showing high noise detected at the surface and sharp fluctuations of the bottom (yellow line is the sounder-detected bottom). The small inserts are an expansion of the surface and the bottom regions.
Transducer motion results in a change in the orientation of the transducer beam, relative to the insonified targets, between transmission and echo return. Targets insonified on-axis may be received off-axis or vice versa. Similarly, the return signal from targets insonified at the edge of the beam may be lost. The effect of transducer motion on data is complex, but includes:
Echo integration (SV) values will be lower than that expected (Stanton 1982)
Single target TS values may be higher or lower than expected (Furusawa and Sawada 1991)
Significant errors will occur in tracking single target TS (Furusawa and Sawada 1991)
If interested in a mean backscattering cross-section across a range of random targets, this effect may be negligible (Furusawa and Sawada 1991)
However, application of single target detection criteria (angle or TS) may result in the rejection of otherwise valid echoes
Effects on SV and TS data will be greatest for narrow beams (i.e., < 10º, Stanton 1982, Furusawa and Sawada 1991)
Errors will increase at depths greater than 50-100 m (Furusawa and Sawada 1991)
In the case of common Great Lakes surveys using narrow beam transducers (~7º) and in situ or theoretical TS, transducer motion could result in a significant underestimation of density. The use of high-resolution pitch/roll data recorders, standard on most marine research vessels, can minimize these errors.
{kind=link}