Procedures for the collection of vessel noise data are available from the manufacturers. Recommendations from Mitson (1995) and Simrad suggest that passive data should be collected under the following conditions:
vessel stationary and running
incrementally increasing the vessel to survey speed
vessel running at survey speed
incrementally decreasing the vessel to stationary
towing trawls (midwater and/or bottom) to be used during the survey
If increasing noise is observed with increasing speed, and vice versa with decreasing speed, the propeller is causing the noise. It is then also advisable to collect passive data under different pitch and propeller speeds. A minimum of 2-5 minutes of passive noise collection under each condition/speed is recommended.
By using the echogram color scheme, the user may evaluate whether noise levels will mask the targets of interest.
The following example is taken from Simrad EK60 Manual:
If the desired lower Sv limit is -70 dB, and a Signal-to-Noise Ratio (SNR) of 10 dB is required, set the minimum color scale for the 20logR TVG to -80 dB. The point at which shading in the echogram (e.g., gray) begins is the depth at which the Sv limit is obtained with the 10 dB SNR.
The same can be done using the 40logR TVG echogram for TSm.
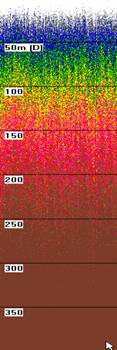
Passive data collected with 120 kHz echosounder, showing increases in noise with depth. Lower threshold is -90 dB.
Noise levels at 1 m (Sv at 1 m) observed during survey conditions should be recorded and reported in papers that utilize the survey data. Note that noise level measured in the TSu domain is not the same as noise levels in the Sv domain (Equation [24]).
{kind=link}